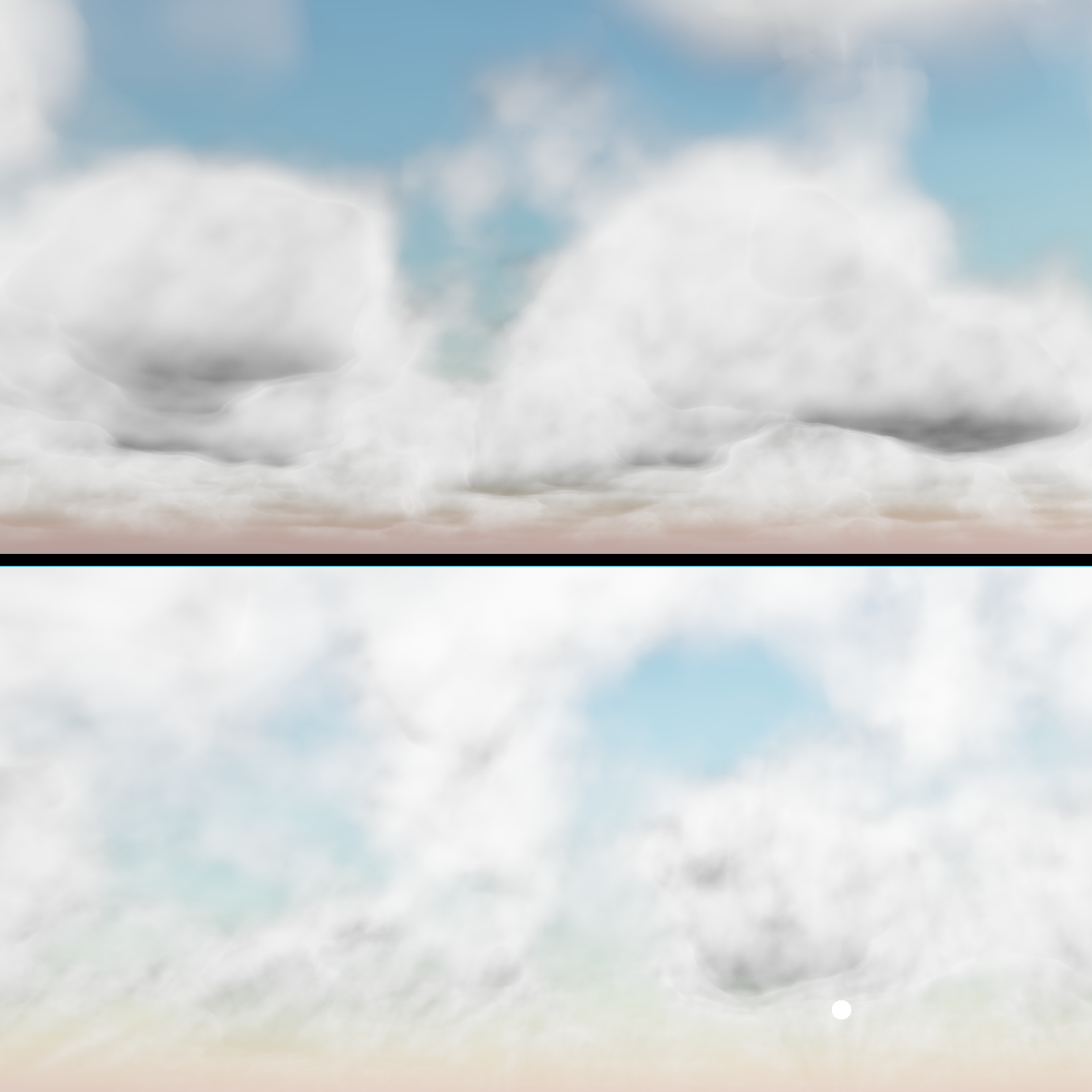
Meteoros
Clustered Deferred Shading
Hand Of God
Aman Sachan
Computer Graphics Engineer
Portfolio
Art
About
Resume
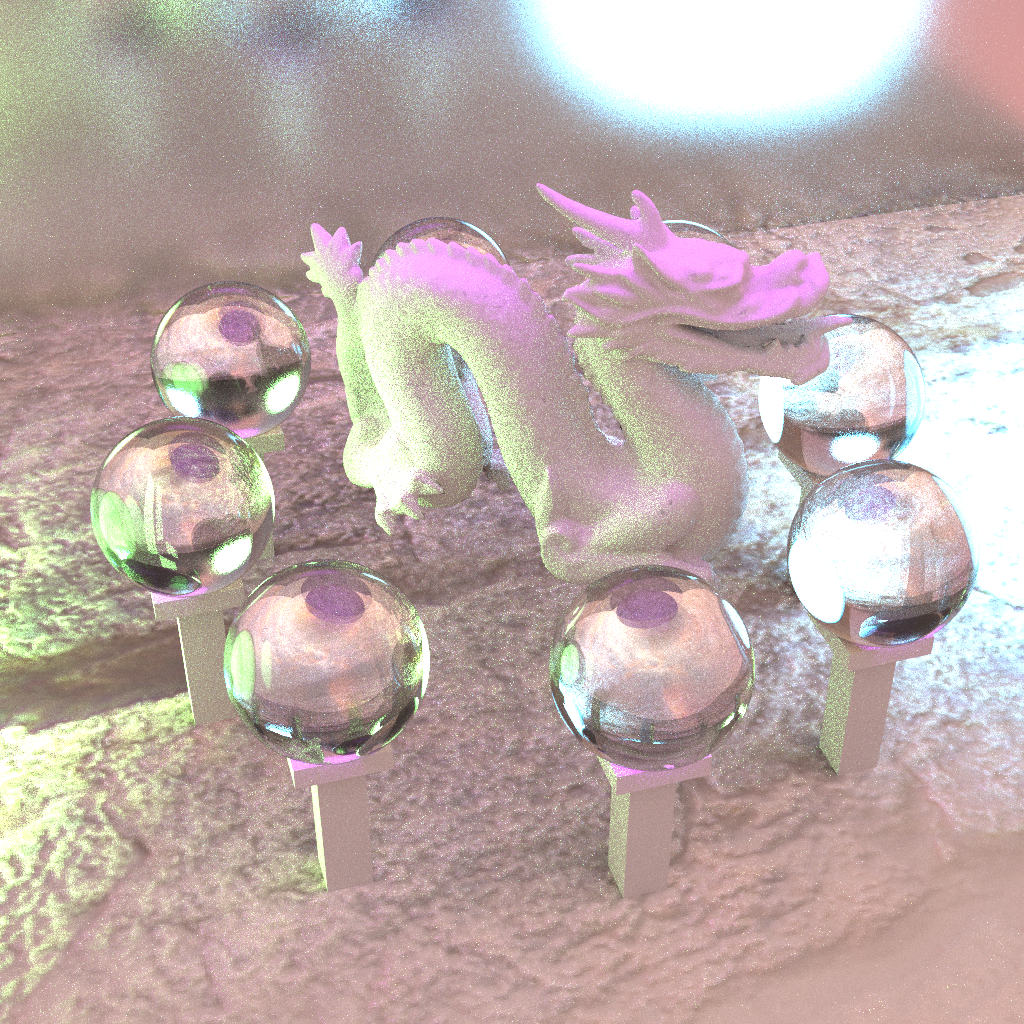
Monte Carlo Path Tracer
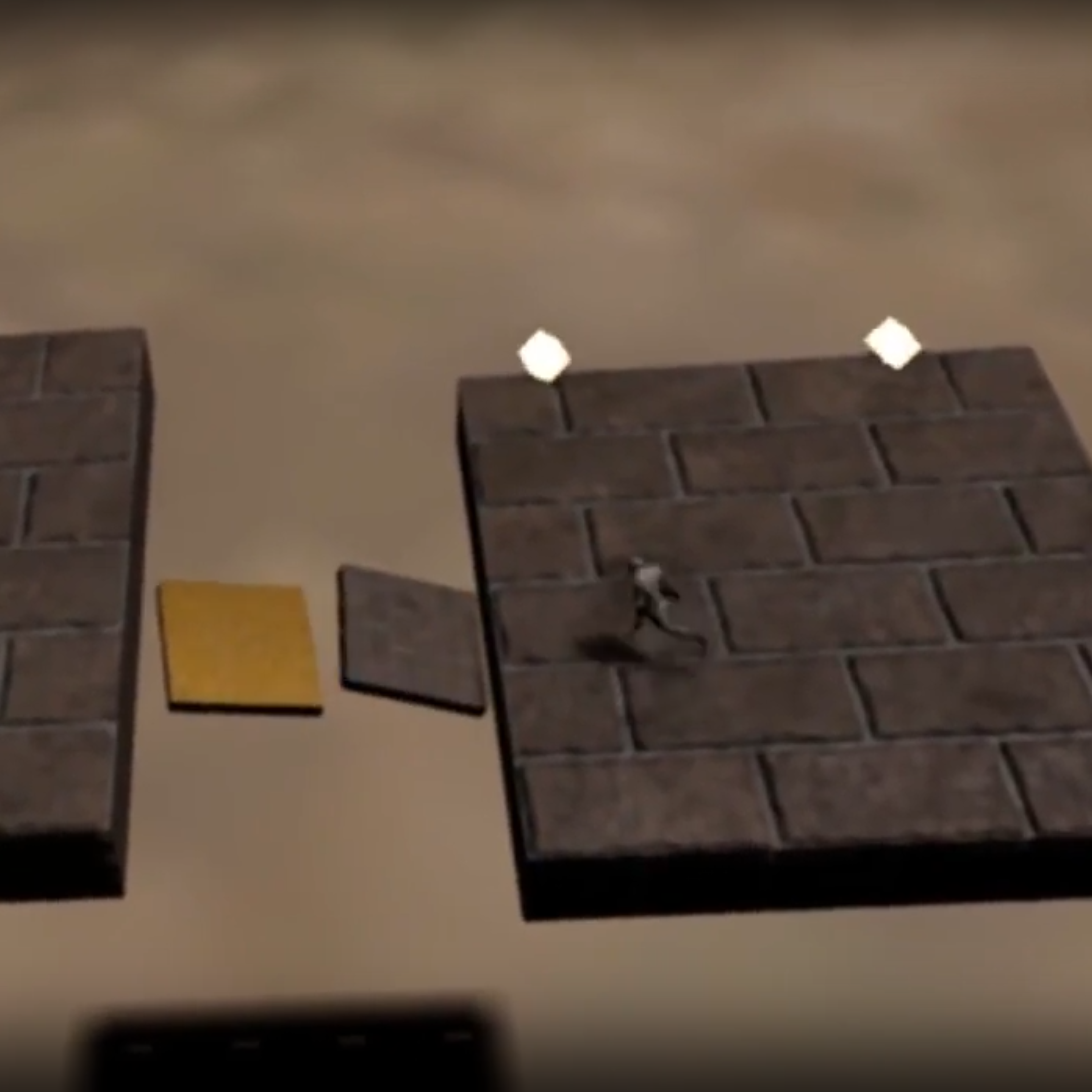
Bunny Bouncer
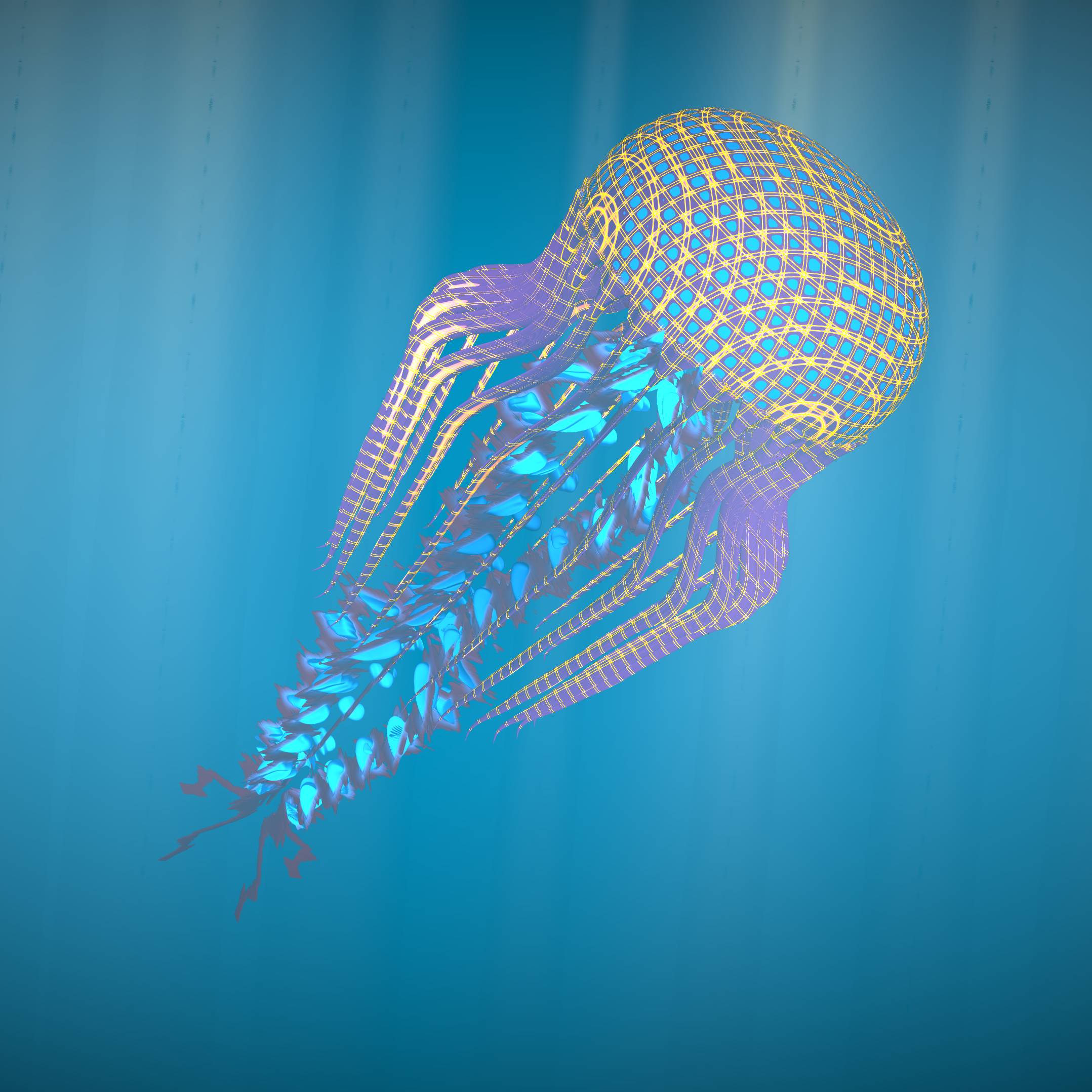
Stylized Jelly